




Todas as Notícias
 Ascom
Ascom
Notícias
Alunos do CIn apresentam trabalhos no Workshop LatinX do NeurIPS 2019
A maior conferência de aprendizagem de máquina do mundo ocorreu no dia 9 de Dezembro, em Vancouver, Canadá
Estudantes do Centro de Informática (CIn) da UFPE apresentaram dois trabalhos no Workshop LatinX da Conference on Neural Information Processing Systems (NeurIPS) 2019. A maior conferência de aprendizagem de máquina do mundo ocorreu de 8 a 14 de dezembro, na cidade de Vancouver, no Canadá. O objetivo do evento é promover a troca de conhecimento na área de neural information processing systems, abordando o caráter biológico, tecnológico, matemático e teórico.
Imagem: Divulgação
Projeto é pioneiro no uso da técnica de aprendizagem por reforço para controlar time de robôs
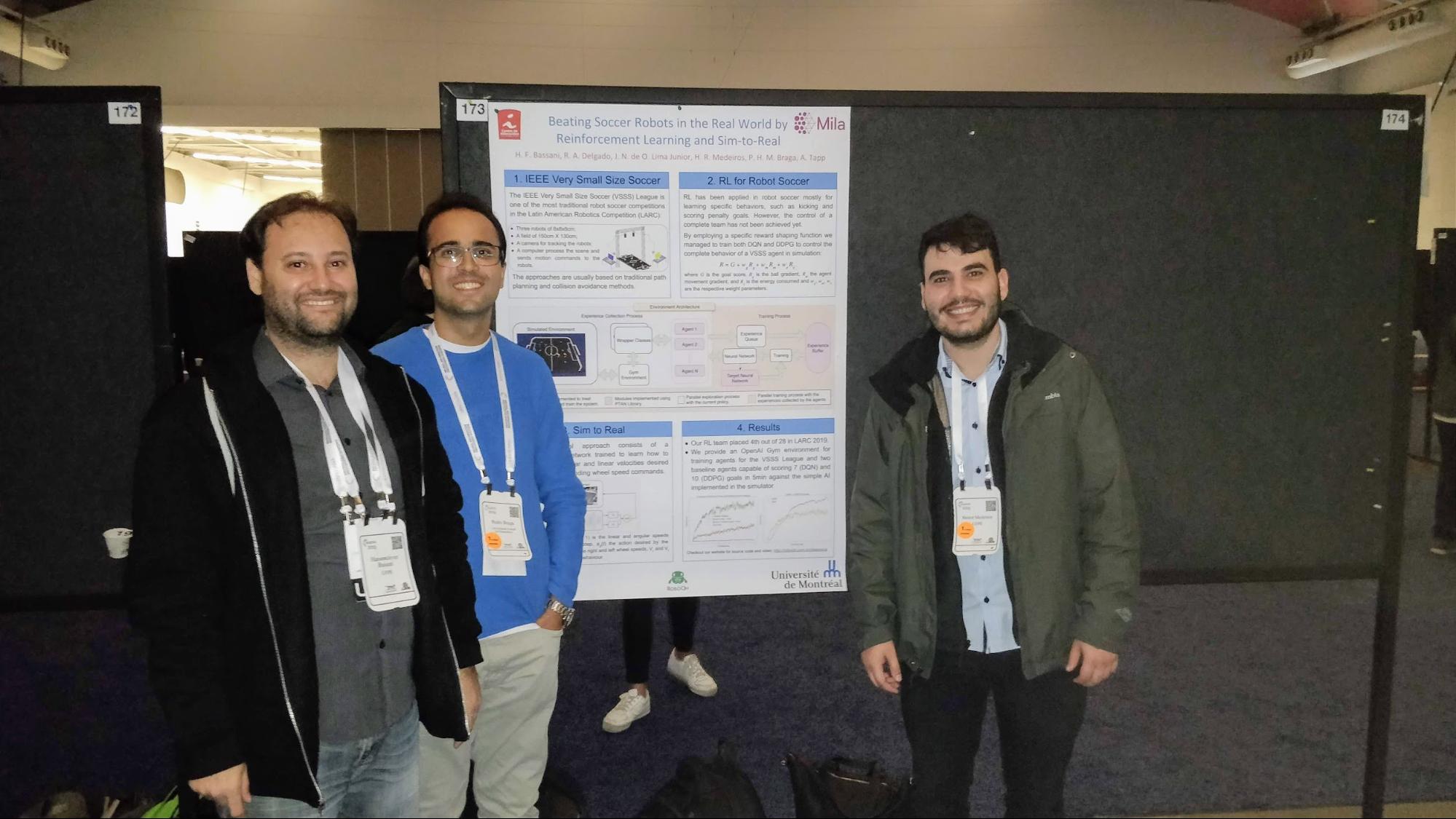
O primeiro projeto apresentado na conferência pelos alunos do CIn foi o “Beating Soccer Robots in the Real World by Reinforcement Learning and Sim-to-Real”, realizado em parceria entre o RobôCIn, grupo de robótica do CIn-UFPE, e o Mila - Quebec Artificial Intelligence Institute, instituto de pesquisa em inteligência artificial de Montreal (Canadá). O projeto contou com a participação dos seguintes pesquisadores: o professor Hansenclever Bassani, os alunos do CIn Renie Delgado, José Nilton, Heitor Medeiros e Pedro Braga, e Alain Tapp, integrante do Mila.
O trabalho foi pioneiro no uso da técnica de aprendizagem por reforço para controlar um time completo de robôs utilizados pelo RobôCIn durante a competição IEEE Very Small Size Soccer (IEEE VSSS), tendo alcançado o 4º lugar e ganhado de times veteranos. Para ser bem-sucedido, o projeto contou também com a ajuda dos demais membros do RobôCIn, da estrutura disponibilizada e fornecida pelo CIn, além da orientação dos professores Hansenclever Bassani e Edna Barros. Para saber um pouco mais sobre o projeto acesse o site do RobôCIn.
O segundo trabalho apresentado no evento foi desenvolvido pelos pesquisadores Pedro Braga, Heitor Medeiros e Hansenclever Bassani com o título “Backpropagating the Unsupervised Error of Self-Organizing Maps to Deep Neural Networks”. A técnica proposta possibilita o treinamento de redes baseadas em protótipos e deep learning de uma maneira sinérgica para o aprendizado de representações em estruturas de dados complexas, como imagens e som. Entre suas possíveis aplicações, é possível destacar tarefas de categorização de dados.